Compass reading
The helmsman sees the compass course, but the needle is affected by the vessel.
Magnetic compass deviation
Turn eight observed compass deviations into a clean coefficient model, a readable curve, and the foundation for printable deviation records.
The problem
A magnetic compass is affected by the boat itself: ferrous metal, electrical equipment, wiring, engines, speakers, batteries, and other onboard magnetic influences. The error is not a single fixed number. It changes as the vessel turns.
The helmsman sees the compass course, but the needle is affected by the vessel.
Measured error is recorded on standard headings during a compass swing.
The final table lets the navigator apply the right correction for each heading.
The model
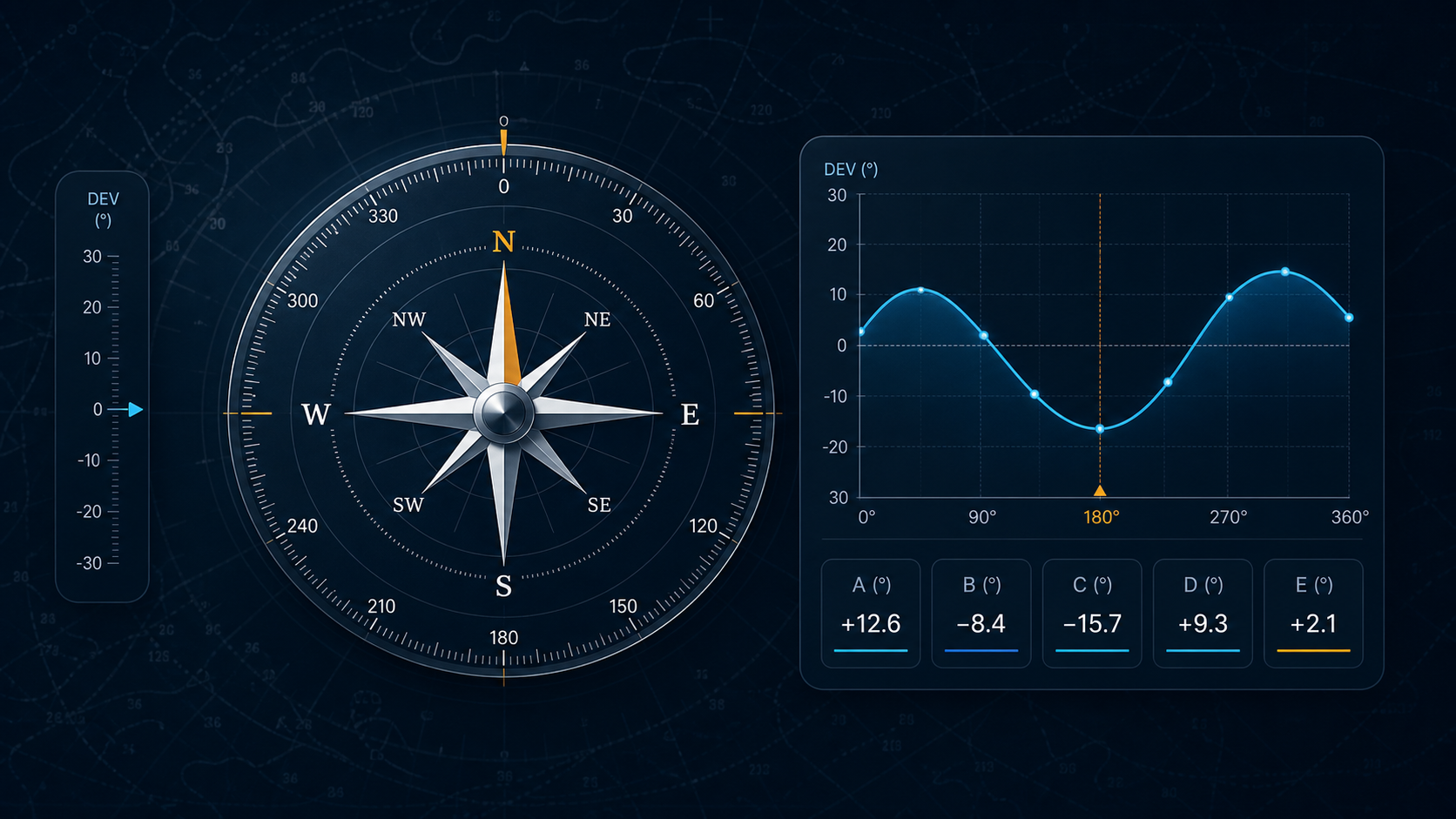
The standard deviation equation separates the compass error into constant, semicircular, and quadrantal parts. Deviation uses that same shape: a smooth wave around the compass, not random isolated errors.
Why eight headings
The classic method uses the main compass directions: N, NE, E, SE, S, SW, W, and NW. These evenly spaced headings let the app estimate the A-E components and draw the residual deviation curve.
Use the values taken during the compass swing on the eight primary headings.
Deviation derives A, B, C, D, and E, then visualizes the curve for quick review.
The next stage is a printable PDF table with vessel records and QR verification.
Built for the next step
Deviation begins as a fast offline-ready calculator. The product path leads to printable deviation tables, vessel history, expiry tracking, and verification.
Open Deviation